(Quasi) Stokes equations (Scipy based Uzawa scheme)
[1]:
from matplotlib import pyplot
import numpy
from scipy.sparse import bmat, linalg
from dune.grid import cartesianDomain
from dune.alugrid import aluCubeGrid
from dune.fem.space import lagrange, dgonb
from dune.fem.operator import galerkin as galerkinOperator
from ufl import SpatialCoordinate, CellVolume, TrialFunction, TestFunction,\
inner, dot, div, grad, dx, as_vector, transpose, Identity
from dune.ufl import Constant, DirichletBC
import dune.fem
muValue = 1
nuValue = 0.1
order = 2
grid = aluCubeGrid(constructor=cartesianDomain([0,0],[3,1],[30,10]))
spcU = lagrange(grid, dimRange=grid.dimension, order=order, storage="numpy")
spcP = lagrange(grid, order=order-1, storage="numpy")
x = SpatialCoordinate(spcU)
mu = Constant(muValue, "mu")
nu = Constant(nuValue, "nu")
u = TrialFunction(spcU)
v = TestFunction(spcU)
p = TrialFunction(spcP)
q = TestFunction(spcP)
exact_u = as_vector( [x[1] * (1.-x[1]), 0] )
exact_p = (-2*x[0] + 2)*mu
f = as_vector( [0,]*grid.dimension )
f += nu*exact_u
mainModel = (nu*dot(u,v) + mu*inner(grad(u)+grad(u).T, grad(v)) - dot(f,v)) * dx
gradModel = -inner( p*Identity(grid.dimension), grad(v) ) * dx
divModel = -div(u)*q * dx
massModel = p*q * dx
preconModel = inner(grad(p),grad(q)) * dx
mainOp = galerkinOperator( (mainModel, DirichletBC(spcU,exact_u)), spcU)
gradOp = galerkinOperator( gradModel, spcP,spcU)
divOp = galerkinOperator( divModel, spcU,spcP)
massOp = galerkinOperator( massModel, spcP)
A = mainOp.linear()
A = A.as_numpy
def Ainv(rhs,target): target[:] = linalg.spsolve(A,rhs)
G = gradOp.linear()
G = G.as_numpy
D = divOp.linear()
D = D.as_numpy
M = massOp.linear()
M = M.as_numpy
def Minv(rhs,target): target[:] = linalg.spsolve(M,rhs)
if mainOp.model.nu > 0: # same as nu.value>0
preconOp = galerkinOperator( (preconModel, DirichletBC(spcP,0)), spcP)
P = preconOp.linear().as_numpy
def Pinv(rhs,target): target[:] = linalg.spsolve(P,rhs)
# discrete functions
velocity = spcU.interpolate(spcU.dimRange*[0], name="velocity")
pressure = spcP.interpolate(0, name="pressure")
sol_u = velocity.as_numpy
sol_p = pressure.as_numpy
# aux. function
rhsVelo = velocity.copy()
rhsPress = pressure.copy()
rhs_u = rhsVelo.as_numpy
rhs_p = rhsPress.as_numpy
r = numpy.copy(rhs_p)
d = numpy.copy(rhs_p)
precon = numpy.copy(rhs_p)
xi = numpy.copy(rhs_u)
# right hand side for Shur complement problem
mainOp(velocity,rhsVelo)
rhs_u *= -1
xi[:] = G*sol_p
rhs_u -= xi
mainOp.setConstraints(rhsVelo)
Ainv(rhs_u[:], sol_u[:])
rhs_p[:] = D*sol_u
Minv(rhs_p, r)
if mainOp.model.nu > 0:
precon.fill(0)
Pinv(rhs_p, precon)
r *= mainOp.model.mu
r += mainOp.model.nu*precon
d[:] = r[:]
delta = numpy.dot(r,rhs_p)
# cg type iteration
for m in range(100):
xi.fill(0)
rhs_u[:] = G*d
mainOp.setConstraints([0,]*grid.dimension, rhsVelo)
Ainv(rhs_u[:], xi[:])
rhs_p[:] = D*xi
rho = delta / numpy.dot(d,rhs_p)
sol_p += rho*d
sol_u -= rho*xi
rhs_p[:] = D*sol_u
Minv(rhs_p[:],r[:])
if mainOp.model.nu > 0:
precon.fill(0)
Pinv(rhs_p,precon)
r *= mainOp.model.mu
r += mainOp.model.nu*precon
oldDelta = delta
delta = numpy.dot(r,rhs_p)
print(delta)
if delta < 1e-14: break
gamma = delta/oldDelta
d *= gamma
d += r
0.05083519140846924
0.004520464458157929
0.0001443814586563057
6.536111368146219e-06
3.445323821267375e-07
2.8767428662099426e-08
1.6235031965105895e-09
2.8276576181054936e-12
1.252191030596945e-13
9.279809692348484e-15
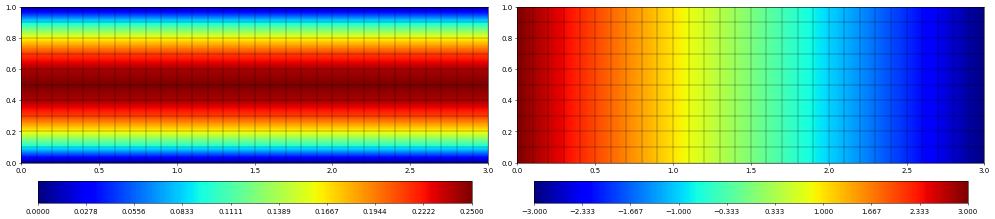
Now we can easily plot the velocity magnitude and pressure
[2]:
fig = pyplot.figure(figsize=(20,10))
velocity.plot(colorbar="horizontal", figure=(fig, 121))
pressure.plot(colorbar="horizontal", figure=(fig, 122))
This page was generated from
the notebook uzawa-scipy_nb.ipynb
and is part of the tutorial for the dune-fem python bindings
![]()