|
dune-pdelab 2.10-git
|
Loading...
Searching...
No Matches
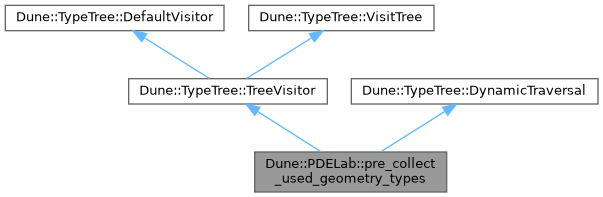
Dune::PDELab::pre_collect_used_geometry_types Struct Reference
#include <dune/pdelab/ordering/gridviewordering.hh>
Inheritance diagram for Dune::PDELab::pre_collect_used_geometry_types:
Public Member Functions | |
| template<typename Node , typename TreePath > | |
| void | leaf (Node &node, TreePath tp) const |
| template<typename Node , typename TreePath > | |
| void | pre (Node &node, TreePath tp) const |
| pre_collect_used_geometry_types (std::size_t dimension) | |
| void | pre (T &&, TreePath) const |
| void | in (T &&, TreePath) const |
| void | post (T &&, TreePath) const |
| void | leaf (T &&, TreePath) const |
| void | beforeChild (T &&, Child &&, TreePath, ChildIndex) const |
| void | afterChild (T &&, Child &&, TreePath, ChildIndex) const |
Public Attributes | |
| const std::size_t | dim |
Static Public Attributes | |
| static const TreePathType::Type | treePathType |
Constructor & Destructor Documentation
◆ pre_collect_used_geometry_types()
|
inline |
Member Function Documentation
◆ leaf()
template<typename Node , typename TreePath >
|
inline |
◆ pre()
template<typename Node , typename TreePath >
|
inline |
Member Data Documentation
◆ dim
| const std::size_t Dune::PDELab::pre_collect_used_geometry_types::dim |
The documentation for this struct was generated from the following file:
Legal Statements / Impressum | Hosted by TU Dresden & Uni Heidelberg | Generated by
 1.9.8
1.9.8